About Me

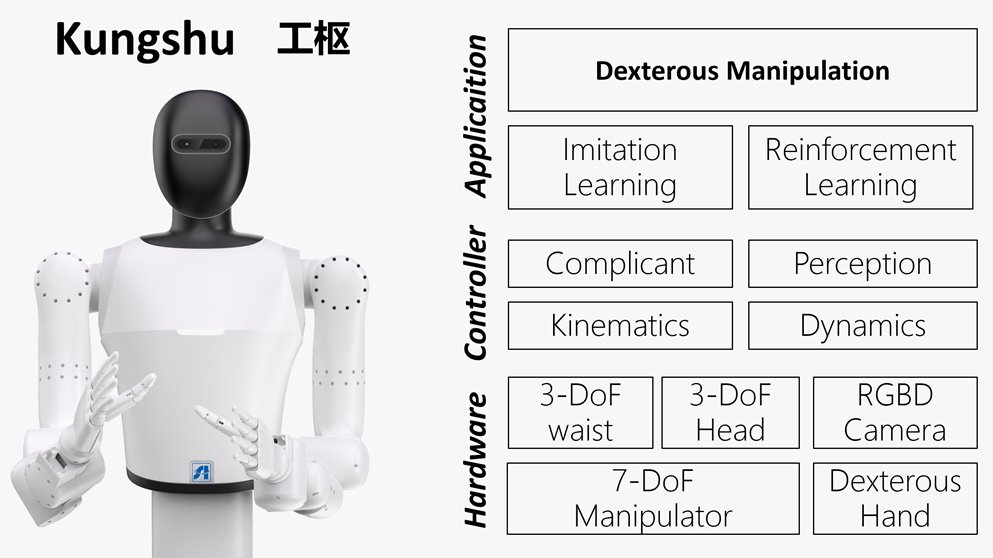
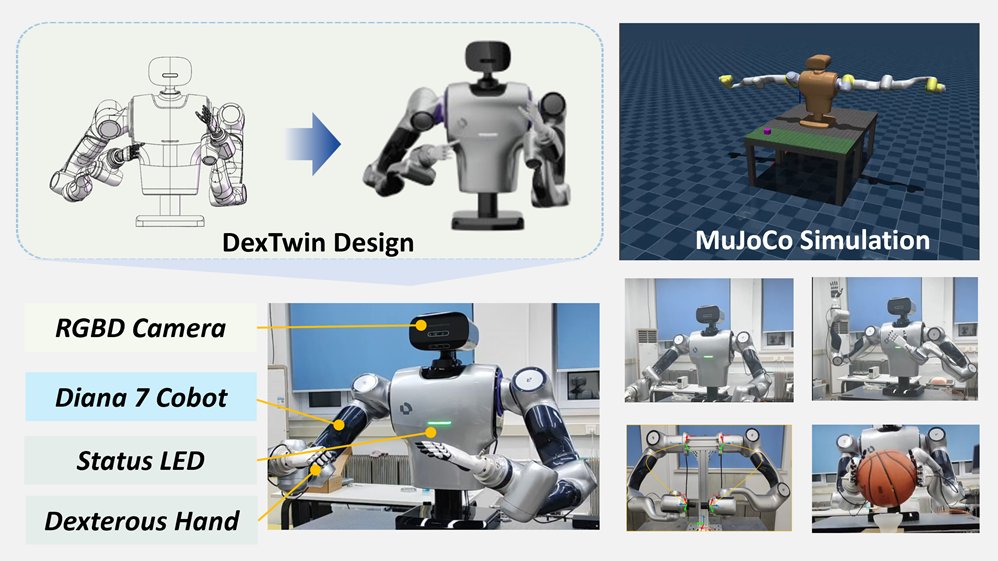
Hi, My name is Yang Luo, I'm now a robotics researcher at Shenyang Institute of Automation, Chinese Academy of Sciences. I received my Ph.D. degree in 2019 from State Key Laboratory of Robotics and Systems, Harbin Institute of Technology. My research interests mainly focus on Robot System Integration, Robot Motion control, Trajectory Planning, Human-Robot Interaction and Dexterous manipulation.
Let's make some fanny robots!!
If you are interested in my work, please feel free to contact me.
- Address: No.114 Nanta Street
- Phone: +86 186 8674 4086
- City: Shenyang, China
- Email: luoyang@sia.cn
Interests
Education

Experience


Skills
I have a strong passion for building various interesting robotic systems and empowering them with impressive motion capabilities through programming. Architecture design excites me greatly, and I maintain a keen interest in programming languages, design patterns, and coding standards. As a heavy GitHub user, I feel thrilled when discovering open-source projects with elegant designs and clean code. I aspire to contribute to the open-source community, even though I recognize there's still room for growth in my current abilities.
Programming Languages







Frameworks




Tools





Collaborator