Bone Cutting Robot for TKA Surgery
- Collaborator: Yingli Li, Yunxiang Jiang
This project presents a collaborative robotic system for Total Knee Arthroplasty (TKA) bone resection, integrating a 7-DoF cobot, a 3-DoF cutting end-effector, and an in-line force/torque sensor for compliant and safe operation. The platform supports multiple surgical tools, including a saw and a planar processing module, to improve cutting consistency and intraoperative precision. By combining force-aware control with a structured surgical workflow, the system aims to reduce manual variability, enhance procedural accuracy, and provide a practical pathway toward robot-assisted orthopedic surgery.
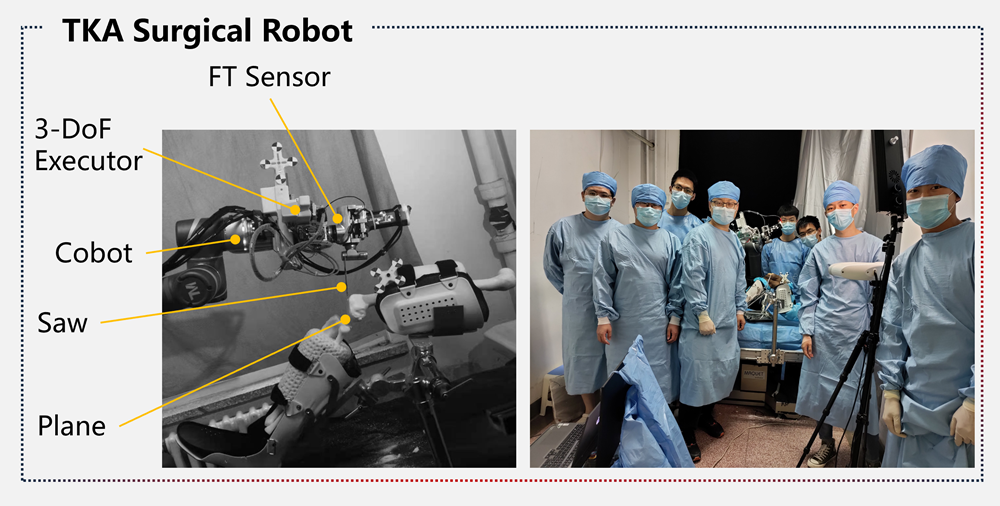
System Overview of Bone Cutting Robot for TKA Surgery