SEA Demo App
- Collaborator: Yunxiang Jiang, Xiang Li, Jincheng Sun
- SEA_Demo_Server: Project Link
- SEA_Demo_Unity: Project Link
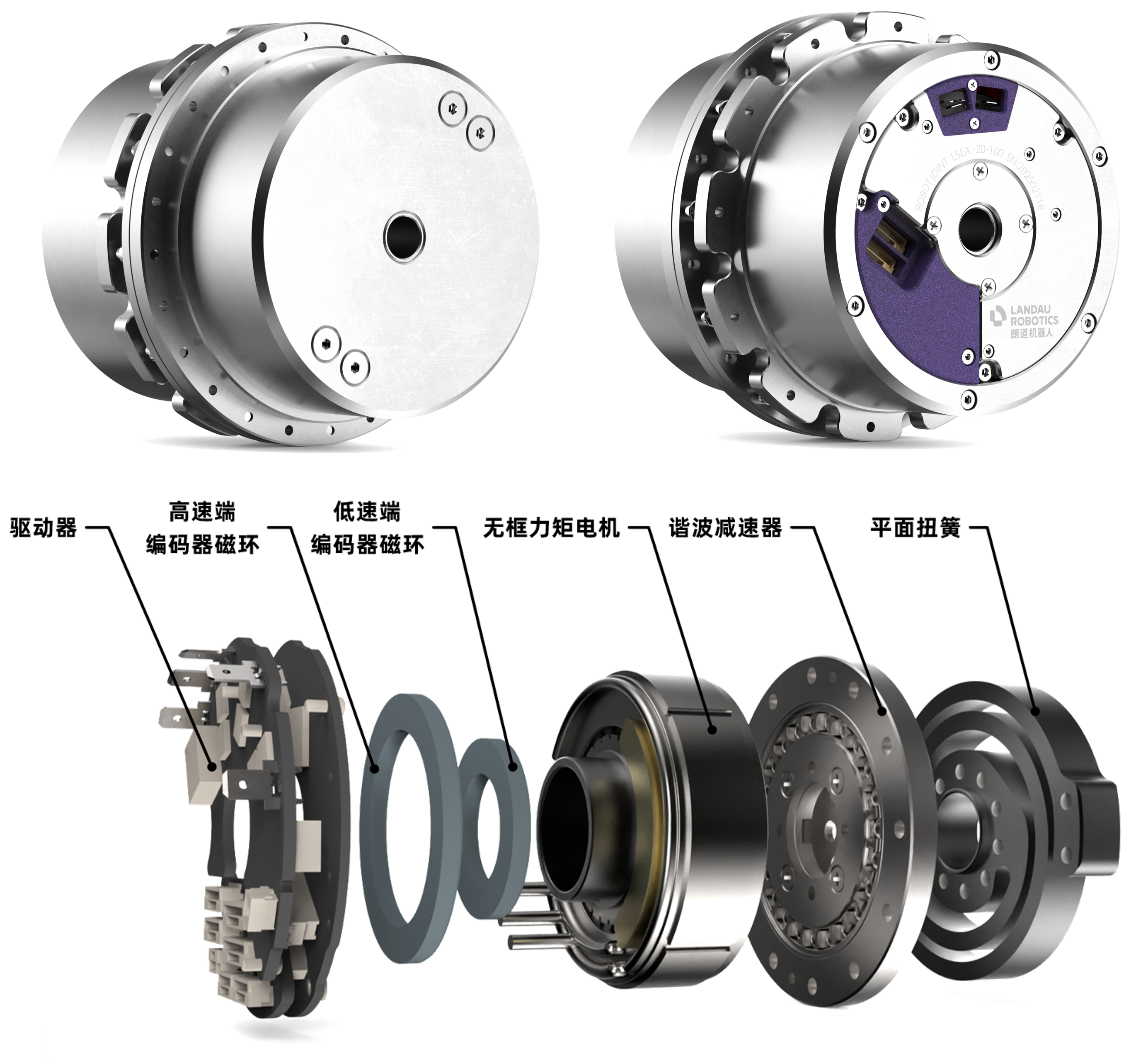
S.E.A: Series Elastic Actuator
The Series Elastic Actuator (SEA) is a key actuating component designed for electromechanical systems such as robots and rehabilitation equipment. Its core feature is the integration of an elastic element (commonly springs, elastic cords, or flexible materials) in series between the motor and the load (e.g., robot joints or human body parts requiring assistance), rather than the rigid direct connection between the motor and the load found in traditional actuators.
The primary purpose of this design is to address the pain points of traditional rigid actuators in human-machine interaction and complex environment operations through the "buffering" and "energy storage" properties of the elastic element. On one hand, the elastic element can absorb impacts at the load end (such as when a robot joint collides with an obstacle or when rehabilitation equipment makes sudden contact with the human body), preventing damage to the motor or mechanical structure due to rigid impacts while significantly enhancing the safety of human-machine interaction (reducing hard contact injuries to the human body). On the other hand, the elastic element can provide real-time feedback on changes in the load force (by detecting the deformation of the elastic element to infer the force magnitude), enabling the system to sense and control the output force more accurately. This makes SEAs particularly suitable for force-controlled scenarios, such as precision assembly by robots and flexible assistance provided by rehabilitation robots to patients.
For instance, when SEAs are used at the joints of rehabilitation training robots, they can not only provide stable auxiliary torque but also "sense" the patient's active force intention through the deformation of the elastic element—avoiding conflicts between the motor's output force and the human body's active force. Additionally, they can buffer impact forces when the patient loses balance during movement, ensuring safety in use.
SEA Demo App Development
This project is a demonstration application for the Series Elastic Actuator (SEA) developed using Unity. It showcases the capabilities and functionalities of the SEA through an interactive interface, allowing users to experience and understand the benefits of this innovative actuator design.