Research on Navigation Technology for Indoor Walking-Aid Robot
- Period: Sep. 2012 - Jul. 2014
- From: National Sci. & Tech. Support Program
Against global population aging and sustained growth, the rising elderly and visually impaired face severe ambulation/mobility issues, undermining their quality of life and burdening families and society. Thus, developing walking aid robots with localization, navigation, obstacle avoidance, and HCI functions has become a global research priority.
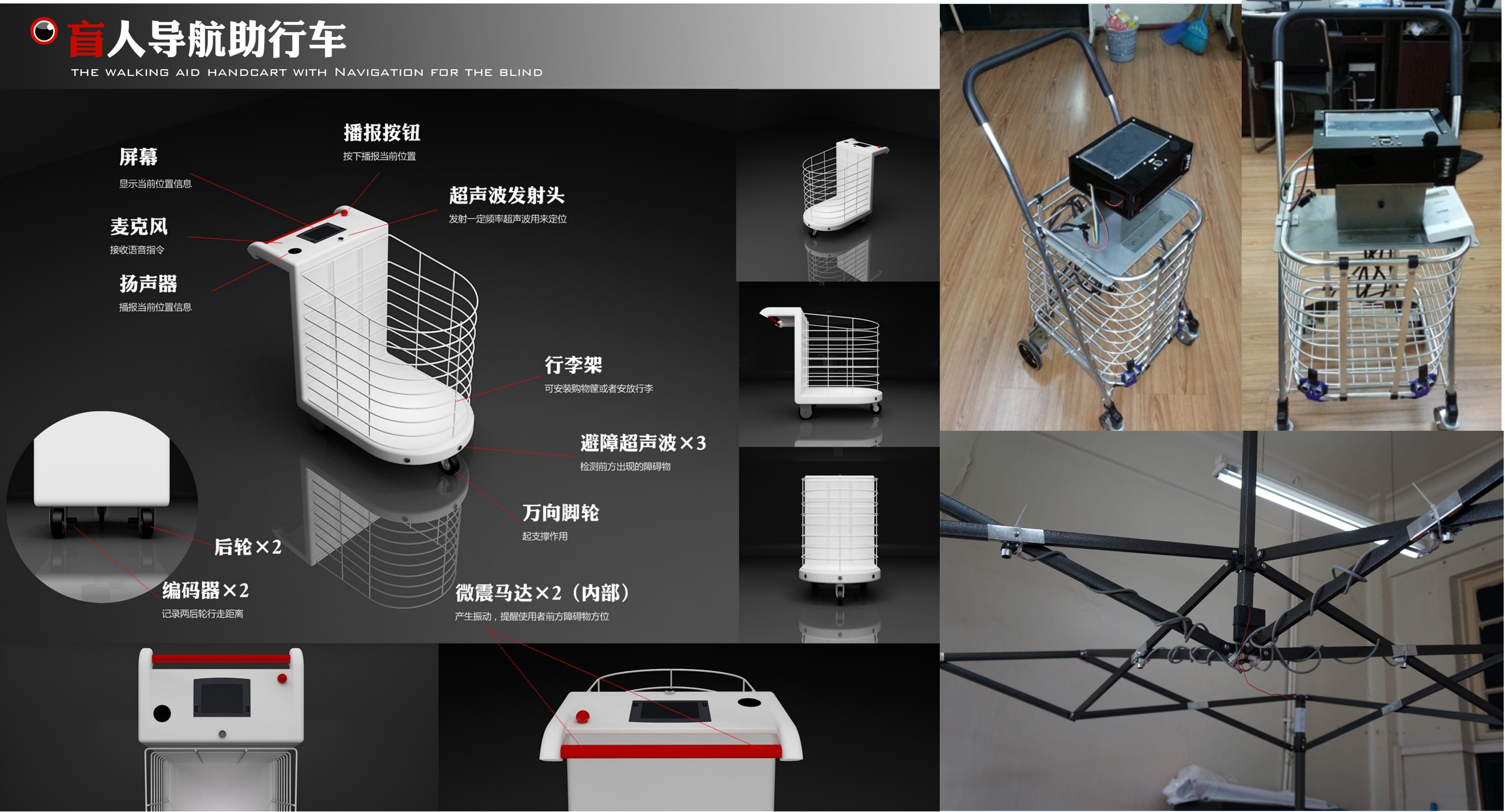
This study details the R&D of an indoor walking aid robot for hospitals, airports, etc. It integrates an ultrasonic network localization system, an inertial navigation system (with digital compass and encoders), ultrasonic sensors for real-time obstacle avoidance, and a voice-display HCI system, presenting the robot’s full design.
First, its localization algorithm was optimized: an improved trilateration-based algorithm processed ultrasonic data, and EKF realized multi-module data fusion to boost accuracy. Second, the localization/navigation system (hardware/software for ultrasonic localization, dead reckoning, obstacle avoidance, HCI, master control) and the robot’s structural packaging/appearance were designed.
Finally, experiments at Huazhong University of Science and Technology tested the ultrasonic system, dead reckoning, and overall localization/navigation. Results show high-precision localization/navigation, rapid obstacle response, and sensitive voice recognition, meeting design objectives.