URDF
URDF(Unified Robot Description Format,统一机器人描述格式)是用来描述机器人模型的重要格式。URDF采用XML语言来描述机器人的模型。
文件格式
URDF采用一系列的嵌套标签来描述机器人的各个环节,比如<link>标签、<joint>标签、<robot>标签、<gazebo>标签等。
<robot>标签
<robot>标签是完整机器人模型的最顶层标签,<link>和<joint>等标签都必须作为子元素被包含在其内部。其基本语法如下:
|
|
<link>标签
<link>标签用于描述机器人刚体部分的外观和物理属性,其元素包括外观元素(visual)、碰撞元素(collision)以及惯性元素(inertial)等。而外观元素下又包括位姿(origin)、几何(geometry)以及材料(material)等;碰撞元素下和外观元素类似,但没有材料;惯性元素下包括质量(mass)、位姿(origin)以及惯性矩阵(inertia)等。其结构大致如下:
|
|
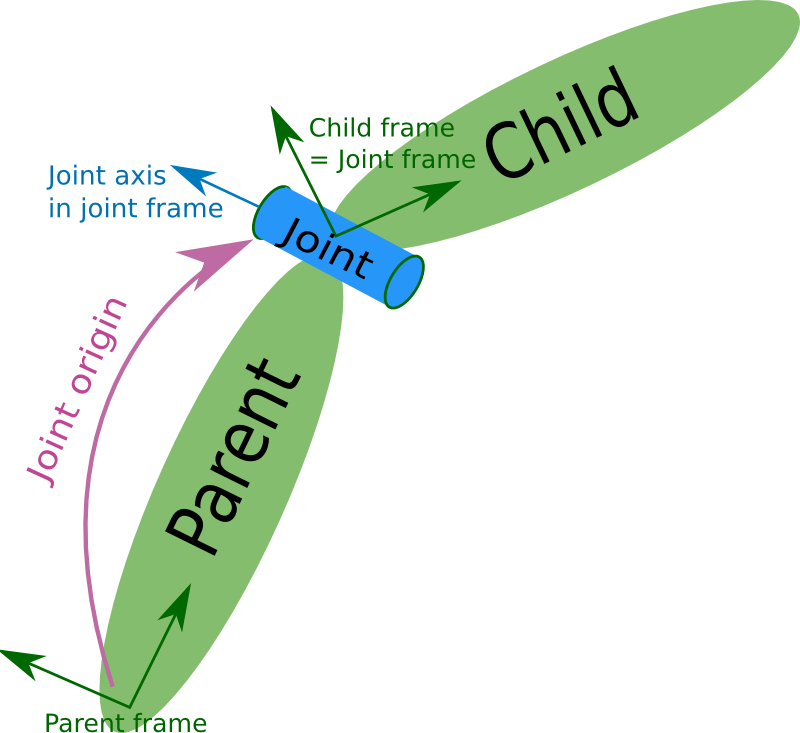
<joint>标签
<joint>标签用于描述机器人关节的运动学和动力学属性,包括关节运动的位置和速度限制。机器人关节运动形式共6种类型:
| 关节类型 | 描述 |
|---|---|
| continuous | 旋转关节,可以绕单轴无限旋转,比如车轮关节 |
| revolute | 旋转关节,但有旋转的角度极限,比如机械臂关节 |
| prismatic | 滑动关节,沿某一轴线移动,带有位置极限,比如滑轨 |
| planar | 平面关节,允许在平面正交方向上平移或旋转 |
| floating | 浮动关节,允许平移、旋转运动 |
| fixed | 固定关节,不允许运动的特殊关节 |
关节的作用是连接两个<link>,这两个<link>分别被称为<parent link>和<child link>。
其结构大致如下:
|
|
关节下还可以包括一些其他属性:
<calibration>:关节参考位置,用来校准关节的绝对位置;<dynamic>:用于描述关节的物理属性,例如阻尼(damping),摩擦力(friction)等,在动力学仿真中用到;<limit>:用于描述运动的极限值,包括上下限位置(lower,upper),速度限制(velocity),力矩限制(effort);<mimic>:用于描述该关节与已有关节的关系;<safety_controller>:用于描述安全控制器参数。
<gazebo>标签
<gazebo>标签用于描述机器人在Gazebo仿真中所需要的参数,包括机器人材料属性、Gazebo插件等。该标签不是机器人模型必须部分,只在Gazebo仿真中才需要。
其结构大致如下:
|
|
<transmission>标签
<transmission>标签用于描述驱动器和关节之间的关系。可以对齿轮传动比和并联结构等进行建模。传动可以完成指令和关节力的转换,保持功率恒定。多个驱动器可以通过复杂的传动连接到多个关节。
其结构大致如下:
|
|
注意:<hardwareInterface>中定义了关节硬件接口,当在Gazebo中加载时应为EffortJointInterface。