TF坐标变换
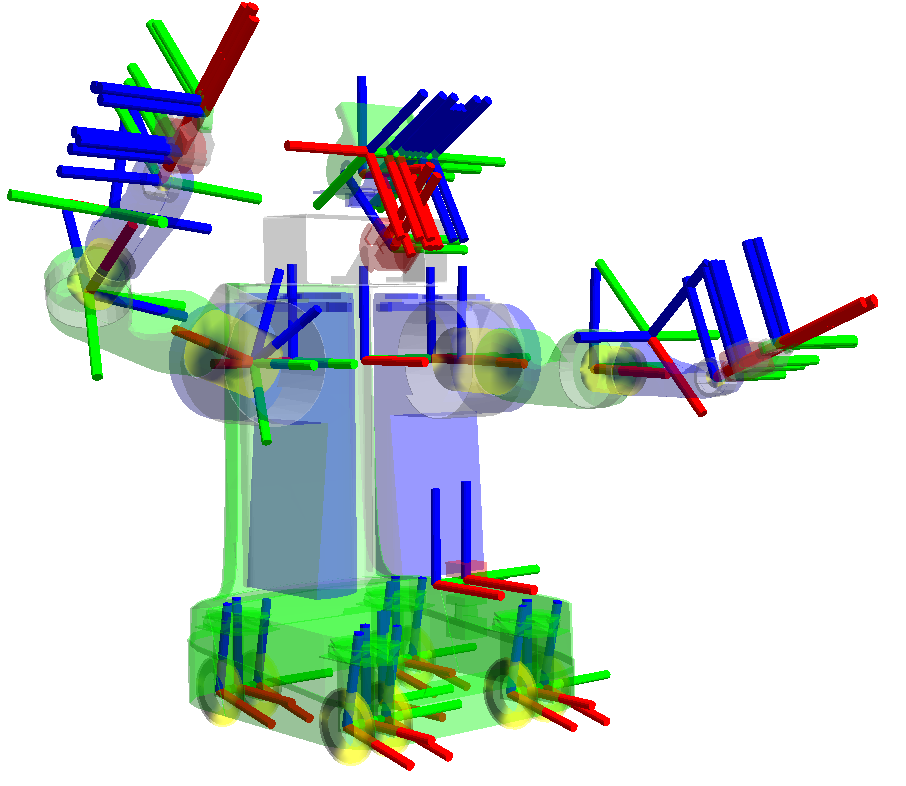
机器人中存在大量组件,各个组件之间都使用各自的相对坐标系,这些坐标系之间的变换往往十分复杂。ROS中为了方便维护这些坐标系之间的变换,提供了TF功能包。从图中也可以看出,PR2机器人上存在的坐标系十分繁杂。
TF功能包
TF是一个让用户随时间跟踪多个坐标系的功能包,它使用树型数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系。可以查询任意时间、任意坐标系之间坐标变换。
TF以时间为轴跟踪这些坐标系的变化,并且允许开发者请求如下类型的数据:
- 5秒之前,机器人头部坐标系相对于全局坐标系的关系?
- 机器人夹取的物体相对于机器人中心坐标系的位置?
- 机器人中心坐标系相对于全局坐标位置?
所有订阅TF消息的节点都会缓冲一份所有坐标系的变换关系数据,所以这种结构不需要中心服务器来存储任何数据。
使用TF功能包,需要以下步骤:
- 监听TF变换(listenTransform)
接收并缓存系统中发布的所有坐标变换数据,并从中查询所需要的坐标变换关系。
- 广播TF变换(broadcastTransform)
向系统中广播坐标系之间的坐标变换关系。系统中可能会存在多个不同部分的TF变换广播,每个广播都可以直接将坐标变换关系插入TF树中,不需要再进行同步。
TF工具
TF功能包中提供了丰富的终端工具来帮助开发者调试和创建TF变换。
tf_monitor
查看TF树中所有坐标系的发布状态,包括发布者、平均延迟、最大延迟等信息。
12$rosrun tf tf_monitor$tf_monitor查看TF树中指定坐标系之间的发布状态。
1$tf_monitor <source_frame> <target_frame>tf_echo
查看指定坐标系之间的变换关系。
12$rosrun tf tf_echo$tf_echo <source_frame> <target_frame>static_transform_publisher
发布两个坐标系之间的静态坐标变换,这两个坐标系不发生相对位置变化。
12$static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms$static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_msperiod_in_ms为发布频率,单位ms。该命令还可以在launch文件中使用:123<launch><node name="link1_broadcaster" pkg="tf" type="static_transform_publisher" args="1 0 0 0 0 0 1 link1_parent link1 100" /></launch>view_frames
view_frames使可视化调试工具,可以生成pdf文件,显示TF树的信息。执行方式:
1$rosrun tf view_frames命令会生成frames.pdf文件,包含可视化的TF信息。
roswtf
roswtf可以分析当前的tf配置,并尝试分析其中的问题。
1$roswtf
TF消息类型
TF默认发布的话题是/tf,消息类型是tf2_msgs/TFMessage,消息结构为:
|
|
消息里存储着所有的坐标系变换信息,其中的geometry_msgs/TransformStamped为其中坐标系变换。
robot_state_publisher功能包
robot_state_publisher提供了将关节(joint)位置信息转换为TF消息并发布的功能,可以利用URDF文件中的信息将机器人状态发布到/tf话题中去。
在launch文件中的使用方法:
|
|